
在微信上关注我们:

本页PR 
CMOS图像传感器比较(适合天文摄影)
Sat, 04/25/2009 - 13:45 — lcpcsky
研制天文专用像机的过程中,对CMOS图像传感器的各种参数有了一个了解,入门级天文像机不在于解析的多高,关键是灵敏度(QE)、长时间曝光性能和成像质量(热噪声/读出噪声)。普通CMOS图像传感器不能用于深空天体摄影,因为大部分是逐行曝光的滚动快门(Rolling Shutter),这有什么不能接受的呢?假如你打算对猎户座大星云曝光60秒,那么这种逐行曝光的CMOS将是每行60秒,如果分辨率是640x480,那么整幅图像拍摄的时间就是480*60秒,整整8个小时!这是根本无法接受的,我们需要可以一次对所有象元进行曝光的芯片,好在“全局快门”技术已经出现在一些工业级CMOS芯片中了,2005年开始研制天文像机的时候,只有美光一个系列的芯片有全局快门,现在已经有数家厂商使用了该技术。
感谢评论的朋友指出理解的错误,滚动快门精确的理解应该是“读出一行的时候,其他行还在(不可避免的)接受曝光”,所以回头看6年前写的这个例子,确实完全理解错了。实际上,假如曝光60秒的话,每一行只晚上一行很短的时间(几个us)开始曝光,而读出的时候,每靠后一行都会晚一些被读取。这个时间就是“Line time”,即内部A/D转换一行所需要的时间。
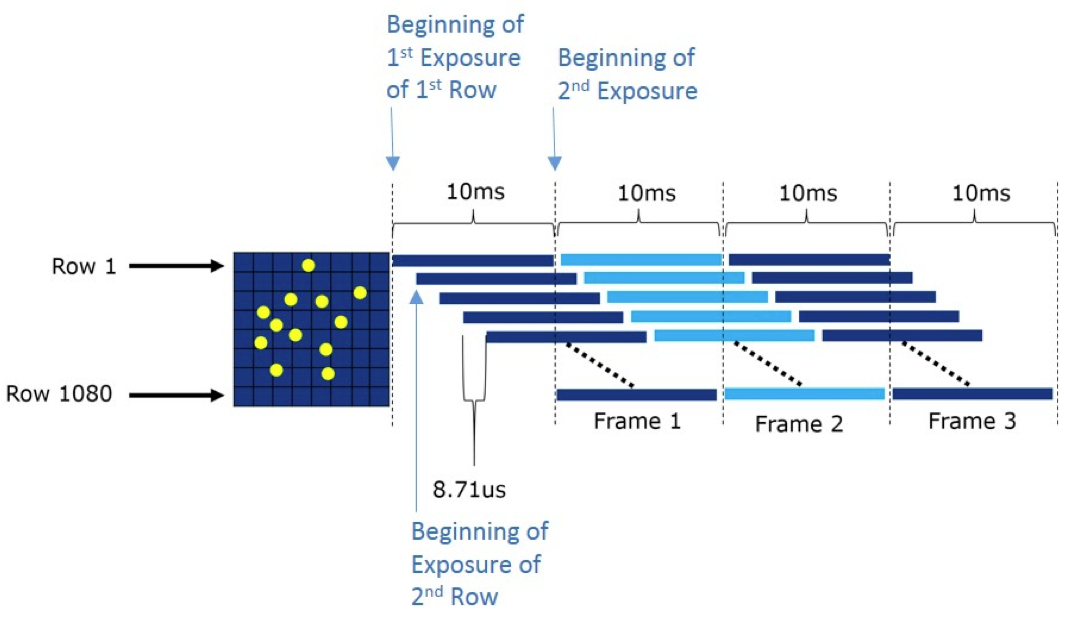
参见:Rolling Shutter vs. Global Shutter
美光的芯片在画质和长时间曝光噪音方面都非常出色,也是最早使用全局快门的厂商,目前,我研制的天文专用像机就是使用美光的芯片,电路板设计正在进行最后一次的修改,希望不久就能产品化,估计成本在400元左右,比较适合入门级的深空摄影应用。
这几天整理了一下具有全局快门的CMOS图像传感器芯片,如下表:
| 图片 | 厂商 | 型号 | 参考价(USD) | 解析度 | 象元尺寸(μm) | 动态范围(dB) | AD位数 | 暗电流 | 满井容量 | 工作温度 |
 |
Aptina(原Micron) | MT 9V032 |
28 | 752x480 | 6 | 55(线性) 100(HiDy) |
10bit | 160mV/s (9042e-/s) @55C |
N/A | -30~ +70C |
 |
赛普拉斯 | IBIS5 -1300 |
308 | 1280x1024 | 6.7 | N/A | 10bit | 7.22mV/s (410e-/s) @21C |
62500e- | -30~ +65C |
 |
赛普拉斯 | LUPA -1300 |
1275 | 1280x1024 | 14 | N/A | 10bit | 170mV/s @30C |
30000e- | N/A |
 |
Photon focus |
D750 | 未知 | 748x400 | 10.6 | 60(线性) 120(LinLog) |
10bit | N/A | N/A | -40~ +105C |
以上资料本人版权所有,转载请注明 来自星星宇宙http://lcsky.org/
![]()
![]()
Comments
应该是同时开始曝光,然后逐行进行AD转换并输出。所以总时间
应该是同时开始曝光,然后逐行进行AD转换并输出。所以总时间是曝光时间加上AD转换时间。
这种说法不对
"假如你打算对猎户座大星云曝光60秒,那么这种逐行曝光的CMOS将是每行60秒,如果分辨率是640x480,那么整幅图像拍摄的时间就是480*60秒,整整8个小时"
这种说法不对,CMOS传感器并不是第一行曝光完了才开始第二行曝光。每行开始曝光的时间虽然不是同时的,但一般是10几微秒,这和图像的宽度还有时钟频率有关,而和曝光时间无关。整幅图像拍摄的时间应该是60秒+480×10微秒,还是约等于60秒。在这种慢速曝光的情况下,滚动快门和全局快门效果几乎是一样的。或许天文相机都是用全局曝光的CMOS芯片,但应该不是你说的那个原因。
我觉得逐行曝光是对的。 我在坐火车的时候,用手机自带的摄像
我觉得逐行曝光是对的。
我在坐火车的时候,用手机自带的摄像头拍摄车外的景象。
结果就出现了歪斜的电线杆,铁路护栏等,特别是近处的景物明显。
显然是逐行曝光的结果,由于火车速度较快,曝光的时间内,每行
之间出现了偏移。